
![[Grasshopper]作業平面の原点とベクトル情報を取得するDeconstruct Planeの使い方](https://iarchway.com/wp-content/uploads/2024/12/eyecatch-3.png)
作業平面の原点とベクトル情報を取得する、Deconstruct Planeの使い方について解説します。
グラスホッパー上では上の2つのどちらかで表されます。
作業平面の原点とベクトル情報を取得する
Deconstruct Planeを使うことで、作業平面の原点とベクトル情報を取得することができます。
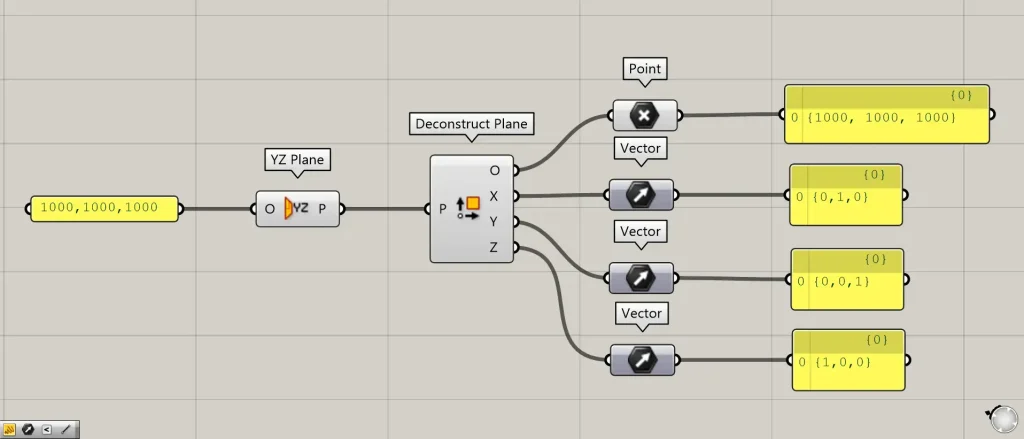
使用コンポーネント:①YZ Plane ②Deconstruct Plane ③Point ④Vector
今回は例として、Y軸とZ軸からできる作業平面を分解してみます。
まず、1000,1000,1000の座標データを、YZ Planeにつなげます。
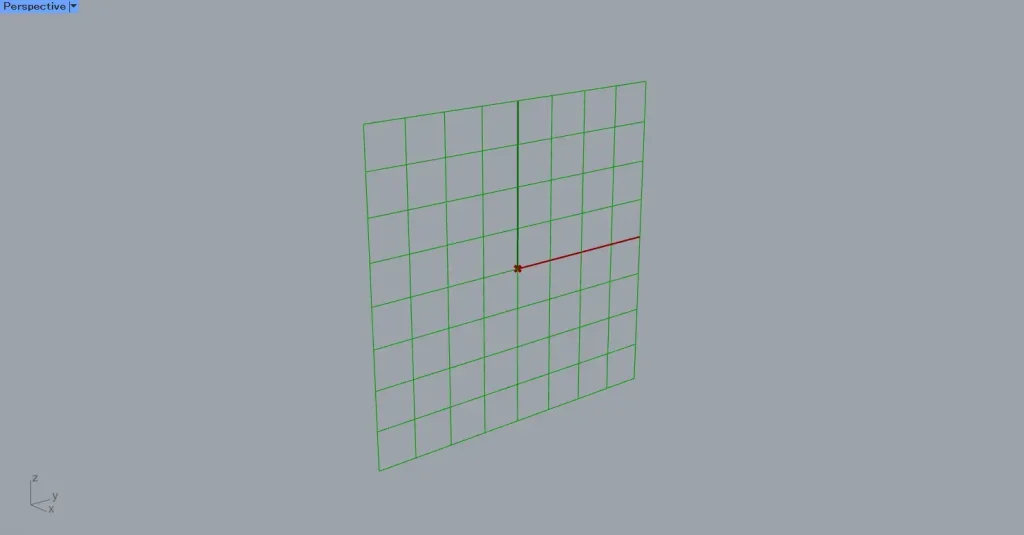
すると、1000,1000,1000の位置に、Y軸とZ軸からできる作業平面が作成されます。
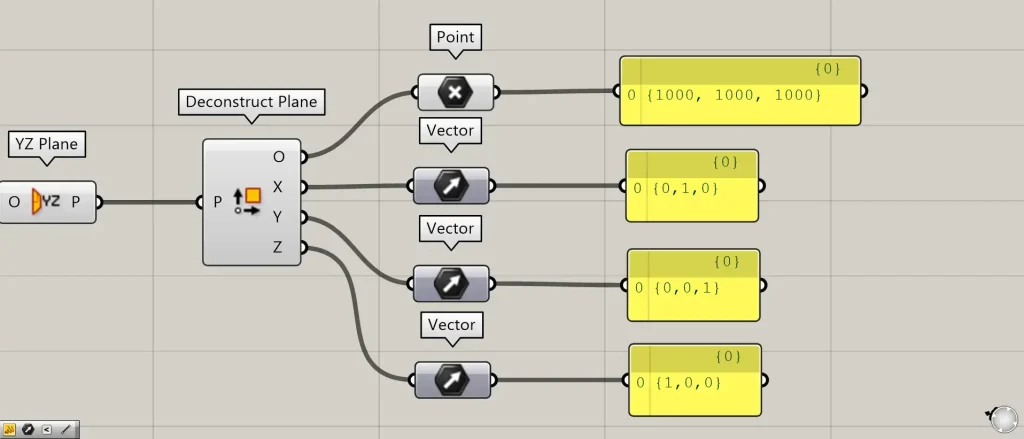
その後、YZ Planeを、Deconstruct Planeにつなげます。
すると、作業平面を構成する4つのデータを取得できます。
O端子からは、作業平面の原点の点データを取得できます。
X端子からは、作業平面のX軸方向のベクトルデータを取得できます。
Y端子からは、作業平面のY軸方向のベクトルデータを取得できます。
Z端子からは、作業平面のZ軸方向のベクトルデータを取得できます。
Deconstruct Planeコンポーネントを使用しているグラスホッパー記事はこちら↓




Comment